
PhysioMio:
We decode
human motion
Frontier research to advance the fundamental
understanding of human movement.
Goal
PhysioMio is a research project dedicated to advance the understanding of human movement at a fundamental level and translating this knowledge into solutions for an improved stroke rehabilitation
Background
Human movement is fundamental to how we interact with the world. It enables us to perform everyday tasks, communicate nonverbally, and maintain independence. Yet, movement is not merely mechanical, it reflects a complex interplay of neural control, muscular activity, and continuous adaptation to the environment. When this system is disrupted, as in the case of a stroke, even simple actions can become significant challenges. Understanding movement in its full physiological and functional complexity is therefore essential, not only to restore lost abilities, but to design more effective, personalized approaches to rehabilitation.
Key developments
Multimodal Sensor Suit
to capture
human movements
Unique clinical dataset
to analyze
human movements
Upper-body Exosuit
to actively support
human movements
Multimodal Sensor Suit
We developed a new wearable sensor system that continuously measures kinematic and neurophysiological (EMG) signals of the upper body targeted for stroke patients with an armparesis

126 active HD-EMG sensors
developed in-house enable high-resolution spatial mapping of muscle activity and deep insights into neuromuscular function.
15 motion sensors
for precise tracking of gross arm movements and fine motor hand and finger motions.
Fully textile-integrated design
to seamlessly embed all sensors and electronics into the textile, creating a comfortable, unobtrusive, and easy-to-use wearable system.
Wireless Data Transmission
of our collected data for real-time monitoring and analysis.
Interactive Frontend
provides live visualization of movement and muscle activity, combined with
data-driven insights into motor and neuromuscular progress.
Completely mobile system
powered by an integrated battery, for flexible use in clinical, laboratory, and
real-world environments without
external infrastructure.
Unique clinical dataset
Within a clinical study (DRKS00032380) we collected the largest and most comprehensive dataset of neurophysiological and kinematic recordings of hand and finger movements in stroke patients to date. By including both affected and unaffected sides and collecting repeated measurements over time, the dataset enables truly bilateral and longitudinal analysis of motor function, an approach not previously realized in this form.
2
rehabilitation clinics
8
months study duration
48
stroke
patients
3
time points per patient (average)
16
different hand
gestures
5.264
human motion recordings
Further detailed information about the clinical study and the resulting dataset can be found in the following ressources:
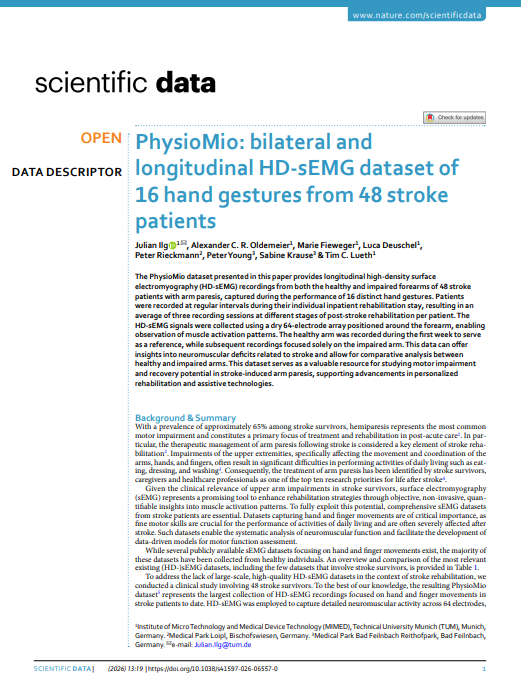
Nature publication
Published in Nature, one of the world’s leading scientific journals, this peer-reviewed paper presents the clinical study and introduces the dataset.
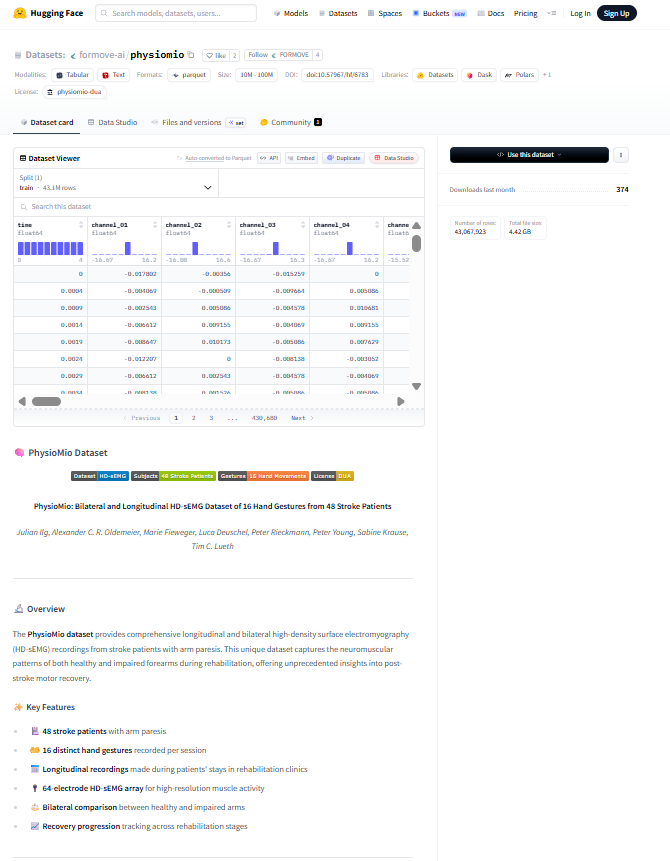
Dataset (HuggingFace)
Open-access repository providing the curated dataset for reproducible research and further exploration of human movement and motor impairment.
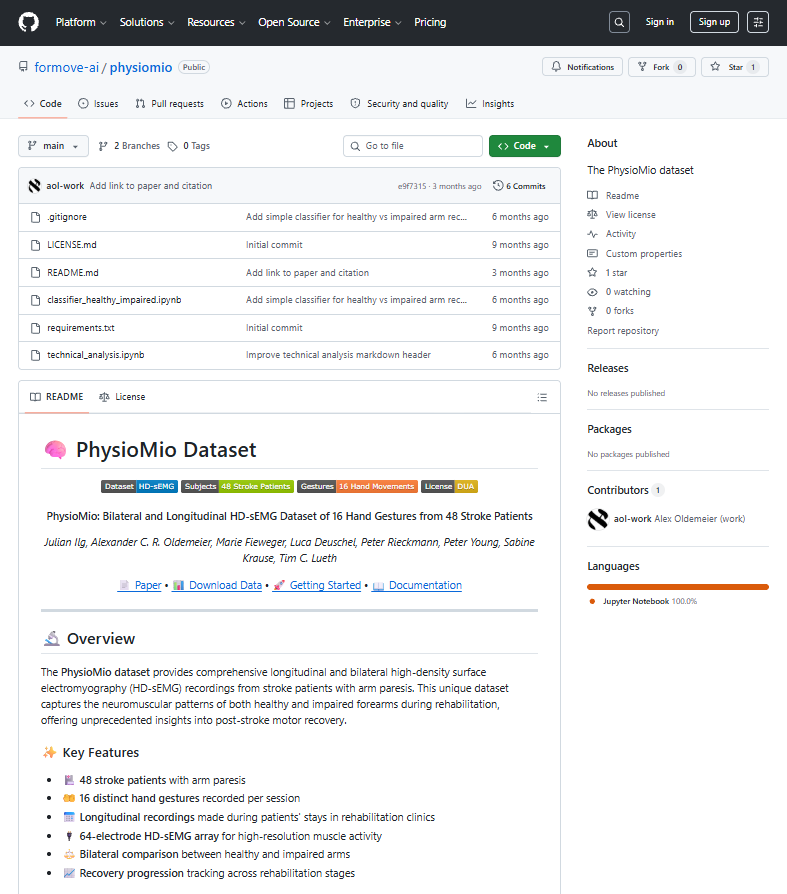
Code (GitHub)
Comprehensive codebase for data processing and analysis, facilitating the use of the dataset and enabling transparent, reproducible workflows.
Upper-body Exosuit
We developed a new wearable sensor system that continuously measures kinematic and neurophysiological (EMG) signals of the upper body targeted for stroke patients with an armparesis
Active Wearable Exosuit
delivers electrically powered assistance while maintaining natural movement without rigid external joints.
11 Degrees of Freedom
enable full support of activities of daily living (ADLs) across shoulder, elbow, wrist, and fingers.
Individually Actuated Fingers
allow both active closing and opening, with precise, independent control of each finger.
Shoulder joint mechanism
based on an underactuated continuum mechanism, ensures adaptive support and natural shoulder motion.
Centralized actuation module
reduces weight on the extremities by placing all motors on the back, improving comfort and wearability.
Onboard Computing
enables fully wireless control and operation, without the need for external hardware.
Team

Julian Ilg

Konstantin Ryan

Alexander Oldemeier

Maximilian Miller
Following the PhysioMio project, Julian Ilg, Konstantin Ryan, and Alexander Oldemeier co-founded the startup FORMOVE, aiming to transfer the intelligence of human movement and interaction to robots. Maximilian Miller continued his research within the EU-funded iMEDCAP project.
Clinical Partners
Medical Park
Loipl
Medical Park
Bad Feilnbach Reithofpark

Deutscher Verband für
Physiotherapie (ZVK) e.V.
Special thanks to Prof. Dr. Peter Rieckmann, Prof. Dr. Peter Young, Dr. Sabine Krause, as well as the staff of the rehabilitation clinics Medical Park Loipl and Medical Park Bad Feilnbach Reithofpark.
Scientific work
Key publications of the PhysioMio project
- Ilg, J., Hinderer, L., Struebig, K. & Lueth, T. C. (2023). A Sensor-Integrated Textile for the Acquisition of Upper Extremity Electromyographic Signals. In Volume 5: Biomedical and Biotechnology. American Society of Mechanical Engineers. https://doi.org/10.1115/IMECE2023-112239
- Ilg, J., Oldemeier, A.C.R., Fieweger, M. et al. PhysioMio: bilateral and longitudinal HD-sEMG dataset of 16 hand gestures from 48 stroke patients. Sci Data 13, 19 (2026). https://doi.org/10.1038/s41597-026-06557-0
Additional academic works within the PhysioMio project
- Langheim, D. 2022, Entwicklung eines tragbaren und aktuierten Textils zur Unterstützung vorgegebener Schulter-Bewegungen, Bachelorarbeit, Technische Universität München.
- Vogt, T. 2022, Entwicklung eines tragbaren Textils zur sensorgestützten Bewegungserkennung von Arm und Hand, Masterarbeit, Technische Universität München.
- Hinderer, L. 2022, Entwicklung eines tragbaren und waschbaren EMG-Textils zur Überwachung des Rehabilitationsfortschritts der oberen Extremitäten bei Schlaganfallpatienten, Semesterarbeit, Technische Universität München.
- Miller, M. 2022, Entwicklung eines aktuierten Soft-Exoskeletts zur adaptiven Unterstützung vorgegebener Hand-Bewegungen, Semesterarbeit, Technische Universität München.
- Hinderer, L. 2023, EMG-based Gesture Recognition and Rehabilitation Tracking in Stroke Patients using Machine Learning Algorithms, Masterarbeit, Technische Universität München.
- Kiesgen, L. 2023, Development of a Wearable, Compact Shoulder Exoskeleton for Rehabilitation, Masterarbeit, Technische Universität München.
- Dalbiès, C. 2023, Simulation and Optimization of Fabric Composition for Integrated Sensors, Masterarbeit, Technische Universität München.
- Zimmer, P. 2023, Development of a Wearable Hand and Arm Motion Tracking Textile for Stroke Rehabilitation, Masterarbeit, Technische Universität München.
- Shtyrlin, A. 2023, Development of a Fabric Based Exosuit for the Actuation of the Shoulder Joint, Masterarbeit, Technische Universität München.
- Wiggenhauser, C. 2023, Optimierung der analogen Signalverarbeitung von EMG-Signalen, Semesterarbeit, Technische Universität München.
- Gotsch, M. 2023, A Modular Approach to Motion Tracking and Bio Signal Acquisition – System Design and Implementation, Semesterarbeit, Technische Universität München.
- Deuschel, L. 2023, Acquisition, Processing and Machine-Learning-Based Analysis of Synchronized EMG and Kinematic Data, Bachelorarbeit, Technische Universität München.
- Miller, M. 2023, Entwicklung eines positionsgesteuerten Soft-Exoskeletts zur adaptiven Unterstützung der Handrehabilitation, Masterarbeit, Technische Universität München.
- Riske, P. 2023, Investigating the relationship of distal and proximal upper limb post-stroke proprioception, Masterarbeit, Technische Universität München.
- Heinrich, D. 2023, Development of a kinematic Concept for the underdetermined Actuation of the Shoulder joint in an Exoskeleton, Masterarbeit, Technische Universität München.
- Wilde, M. 2023, Development of a Wearable and Actuated Textile for the Support of Predetermined Elbow Movements, Masterarbeit, Hichschule Hamm-Lippstadt.
- Voigt, S. 2023, Entwicklung eines fadenbasierten Aktuators zur selektiven Weitung von Kompressionsstrümpfen, Semesterarbeit, Technische Universität München.
- Chen, X.-C. 2023, Entwicklung eines Linearaktors für Bowdenzüge mit Push-Pull Konfiguration, Masterarbeit, Technische Universität München.
- Gollwitzer, P. 2023, Entwicklung eines Motion-Capturing-Datenhandschuhs zur Erkennung von Hand- und Fingerbewegungen, Semesterarbeit, Technische Universität München.
- Fieweger, M. 2024, Data Analysis and Parameter Determination from Electromyographic Sensors for Stroke Rehabilitation, Masterarbeit, Technische Universität München.
- Hekers, T. 2024, Entwicklung und Evaluierung sensorgestützter Handschuhsysteme zur Analyse von Fingerschließkräften, Bachelorarbeit, Technische Universität München.
- Faschingbauer, P. 2024, Deep Learning Based Motion Intention Detection for the Human Hand, Masterarbeit, Technische Universität München.
- Wu, Y. 2024, Entwicklung eines Echtzeit-Dashboards zur intuitiven Unterstützung von medizinischem Personal in der Schlaganfallrehabilitation, Masterarbeit, Technische Universität München.
- Aksehirlioglu, M. 2024, Development of a Dashboard to Visualize Motion Data for Biomechanical Insights, Masterarbeit, Technische Universität München.
- Wenk, S. 2024, Multimodale Analyse von kinematischen und neurophysiologischen Parametern zur Bewertung des Rehabilitationsfortschritts bei Schlaganfallpatienten, Semesterarbeit, Technische Universität München.
- Russek, G. 2024, Conception of a Modular Architecture for the Combination of EMG Sensors, Masterarbeit, Technische Universität München.
- Gollwitzer, P. 2024, Modulare Architektur für einen Sensor-Suit zur Messung von Bewegungen und Muskelsignalen, Masterarbeit, Technische Universität München.
- Lohr, L. 2025, Development and Validation of a Modular End-to-End Pipeline for Class-Agnostic Exercise Assessment Using Motion Capture Data, Masterarbeit, Technische Universität München.
Supported by

PhysioMio was funded by the German Federal Ministry of Education and Research (BMBF) from 08/2022 to 10/2024 as part of the initiative „START-interaktiv: Interaktive Technologien für Gesundheit und Lebensqualität“. Additional information can be found at: https://www.interaktive-technologien.de/projekte/physiomio.